Lecture 12: Matrix Notation for Regression
BIOL709/BSCI339
In matrix notation, the ordinary least squares (OLS) estimates of simple linear regression and factorial analysis is a straightforward generalization:
\[ y = \beta X + \epsilon \]
Here, \(\beta\) represents a vector of regression coefficients (intercepts, group means, etc.), \(X\) is an \(n\times k\) “design matrix” for the model (more on this later), and where \(\epsilon \sim {\cal N}(0, \sigma^2)\).
The (maximum likelihood) estimate of the \(\beta\) vector is given by:
\[\hat{\beta}=\left(\mathbf{X}^T\mathbf{X}\right)^{-1}\mathbf{X}^Ty\]
is a design matrix with two columns (1, X), a very simple case. An even SIMPLER case is to only have an intercept column, where every element is = 1. This is equivalent to just estimating a mean and standard deviation. Walking through this (as below) may provide some intuition for why a column of 1’s is an “intercept”.
1. Model and notation
The model in question is just:
\[ Y \sim {\cal N}(\beta_0, \sigma^2) \]
(Obviously, \(\beta_0\) = \(\mu\) = \(\alpha\), as the intercept is the mean)
We learned that the OLS estimate of \(\beta_0\) was: \[ \widehat{\beta_0} = {1\over n} \sum_{i=1}^n Y_i\]
It turns out, a more general solution for \(\beta\) (including \(\beta_0\)) is: \[ \hat{\beta}=\left(\mathbf{X}^T\mathbf{X}\right)^{-1}\mathbf{X}^Ty\]
In this notation, \(y\) is the vector of observations \(Y_i\). In the case of only an intercept, \(X\) is just a column vector of 1’s. In the following example, assume a vector \(Y = (1,2,3)\), and \(X = \left( \begin{array}{c}1\\1\\1\end{array} \right)\). In R:
(Y <- 1:3)## [1] 1 2 3(X <- matrix(1, nrow=3))## [,1]
## [1,] 1
## [2,] 1
## [3,] 12. Matrix operations
Matrices are basically just a very convenient / powerful shorthand to do bookkeeping and collapse sums on multi-dimensional vectors. You can define a \(n \times k\) matrix \(A\) just by enumerating the row and column elements \(A_{ij}\), where \(i \in {1,2,..,n}\) and \(j \in {1,2, ...,k}\). The following matrix operations are needed to obtain the estimates.
The transpose of \(A_{ij}\) is: \(A^T_{ij} = A_{ji}\). Thus: \(A^T\) is a \(k\times n\) matrix, and (in our example) \(X^T = (1,1,1)\) (a \(1 \times 3\) matrix). In R, the function is just t():
t(X)## [,1] [,2] [,3]
## [1,] 1 1 1Matrix multiplication: The product of a \(n \times m\) matrix \(A_{ij}\) times a \(m \times p\) matrix \(B_{ij}\) is a square \(m \times m\) matrix, the elements of which are: \[(AB)_{ij} = \sum_{k=1}^m A_{ik}B_{kj}\] So, \(X^T X\) is a \(1 \times 1\) matrix, the element of which is \(\sum_{k=1}^3 X^T_{1,k} X_{k,1} = 1+1+1 = 3\). In R, matrix multiplication (and other matrix operations) are denotes with a % delimeter. Thus:
t(X) %*% X## [,1]
## [1,] 3Compare with:
X %*% t(X)## [,1] [,2] [,3]
## [1,] 1 1 1
## [2,] 1 1 1
## [3,] 1 1 1And with
t(X) * X## Error in t(X) * X: non-conformable arraysThe inverse of a matrix: \(A^{-1}\) is defined according to the following identity: \[A^{-1} A = A A^{-1} = I\] Where \(I\) is the identity matrix, or a diagonal vector of 1’s. The inversion of a matrix is a somewhat slippery and subtle thing. It is also an important step in lots of statistical calculations, and somewhat computationally intensive. If a regression procedure is slow, the inversion of the matrix is almost always the computationally limiting step. For example, inverting a \(1000 \times 1000\) matrix takes a noticable amount of time (several seconds on my machine):
system.time(solve(matrix(rnorm(1e6),nrow=1e3)))## user system elapsed
## 1.25 0.00 1.253. Estimating the mean
Ok, back to our case. The inverse of \(X^T X\) is the matrix which returns the identity matrix when mutiplied by \(X^T X\) . Since \(X^T X = 3\), its inverse is just \(1/3\). In R, the inverse is obtained with the solve() function:
solve(t(X)%*%X)## [,1]
## [1,] 0.3333333We multiply this back by \(X^T\) to obtain for the “hat matrix” \(H\) (which converts \(Y\) to \(\widehat{Y}\)). This product (of a \(1\times1\) and a \(1\times 3\) matrix) just carries the 1/3 across all the elements of \(X^T\):
solve(t(X)%*%X)%*%t(X)## [,1] [,2] [,3]
## [1,] 0.3333333 0.3333333 0.3333333When we multiply this by \(Y\) (the last step), you are performing the sum - that is part of the definition of the sample mean - but it weighted by the 1/n term, thus: \[ \left(\mathbf{X}^T\mathbf{X}\right)^{-1}\mathbf{X}^T \, Y = H Y = {1\over 3} y_1 + {1\over 3} y_3 + {1\over 3} y_3 = {1\over3}(1+2+3) = 2.\] In R:
(beta <- solve(t(X)%*%X)%*%t(X)%*%Y)## [,1]
## [1,] 2I.e. \(\widehat{\beta_0} = \widehat{\mu} = \overline{X} = 2\). Voila!
4. Estimating the variance
Note that that estimate of the variance on the residuals, expressed generally, is: \[ \widehat{\sigma^2} = {1 \over n-k} (Y - \widehat{Y})^T (Y - \widehat{Y})\]
In this case, \(k=1\), and the product of the two matrices is just the regular sum of squared residuals in the definition of the sample variance: \[ \widehat{\sigma^2} = {1 \over n-1} \sum_{i=1}^n (Y_i - \widehat{Y})^2\]
Thus, in R:
H <- solve(t(X)%*%X)%*%t(X)
beta.hat <- H%*%Y
Y.hat <-X%*%beta.hat
(sigma.hat <- t(Y-Y.hat) %*% (Y - Y.hat) / (nrow(X) - ncol(X)))## [,1]
## [1,] 1Which is, of course, equal to:
sd(Y)## [1] 15. Adding a column
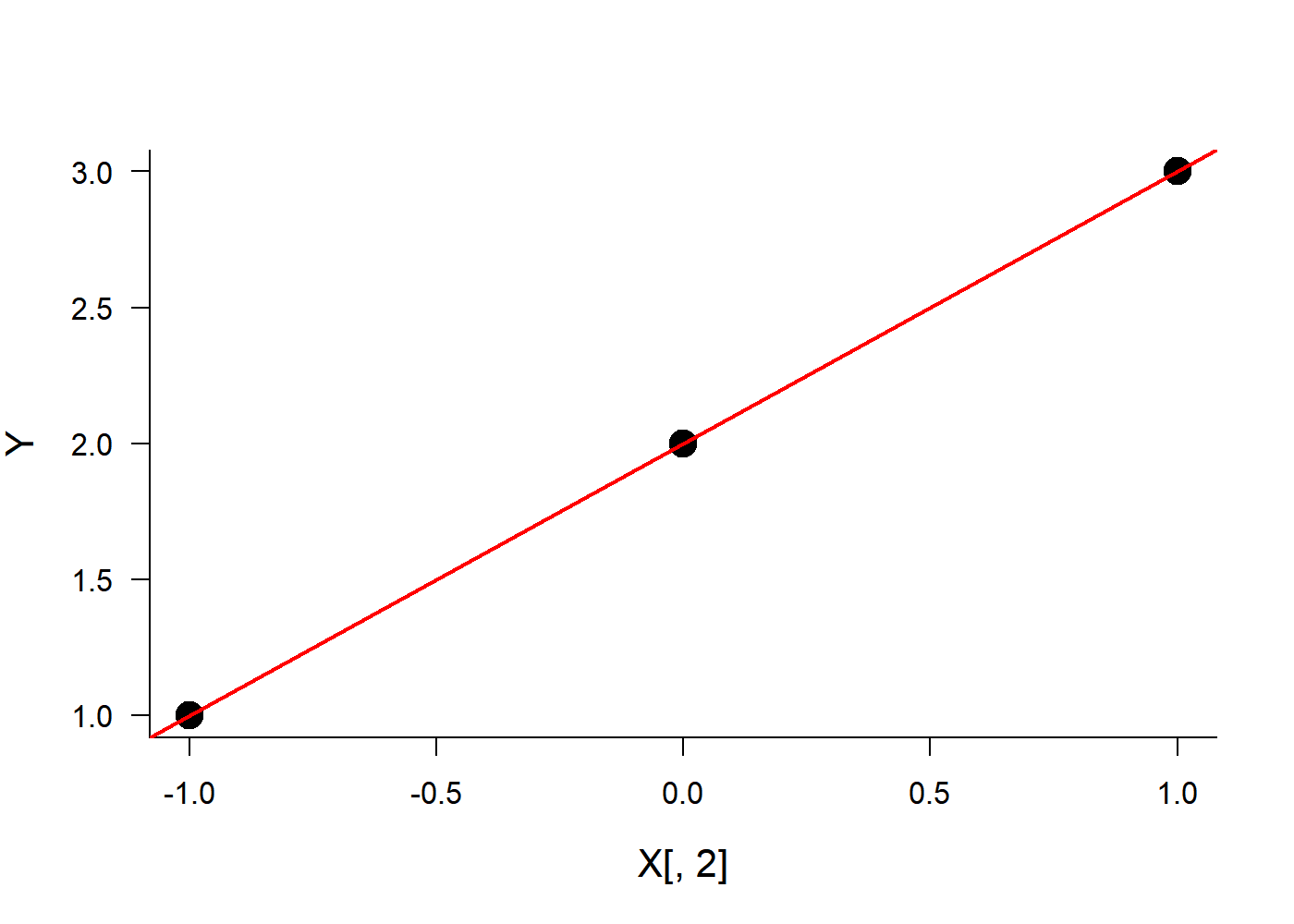
Obviously, the advantage of the matrix notation is its great generality. We can perform a linear regression of \(Y = 1,2,3\) against some covariate \(X = -1,0,1\) using the exact same code. We need only to set up the design matrix:
(X <- cbind(c(1,1,1), -1:1))## [,1] [,2]
## [1,] 1 -1
## [2,] 1 0
## [3,] 1 1(H <- solve(t(X)%*%X)%*%t(X))## [,1] [,2] [,3]
## [1,] 0.3333333 0.3333333 0.3333333
## [2,] -0.5000000 0.0000000 0.5000000(beta.hat <- H%*%Y)## [,1]
## [1,] 2
## [2,] 1Y.hat <-X%*%beta.hat
(sigma.hat <- t(Y-Y.hat) %*% (Y - Y.hat) / (nrow(X) - ncol(X)))## [,1]
## [1,] 0So the regression coefficients are \(\beta_0 = 2\) and \(\beta_1 = 1\), and \(\sigma^2 = 0\). Obviously, that’s correct, but if you need proof:
plot(X[,2],Y, cex=2, pch=19)
abline(t(beta.hat), col=2, lwd=2)